My partner and I were swimming in Barton Springs Pool in Austin, TX the other day. She asked me if I would give her swim lessons. She prefaced the request with, “anyone that has given me swim lessons has left me in tears.”
I thought about her reaction for a moment, and immediately zoned in that the very first thing to learn about swimming is to just be comfortable in the water. This is very similar to the first instruction in meditation, to take a comfortable seat. In meditation, the second instruction is to observe the breath. Following the sensation of the breath anchors the mind to awareness. This helps the mind from being hijacked by cognitive thinking.
Being comfortable in the water also requires finding ease in breathing. Often, people are in a fear response when while swimming. In order to not activate the central nervous system’s sympathetic response, one needs to learn specific movement skills so that breathing is not stressful.
One might think that water is a natural element, as we float in our mother’s belly before being born, and people should be at ease in that element. However, almost everyone experiences their first fear response at the moment of transition from the lungs full of amniotic fluid to the pressurization of the air from taking their first breath.
A component of the fear response is called the startle reflex. The action of the startle reflex is a sharp inhalation, flexion and internal rotation. This is in opposition to the integration of the breathing apparatus, as optimal inhalation is extension with external rotation.
Correcting the disconnect between fear based breathing to a well-integrated breathing apparatus is a must for finding ease in the water – and frankly in life!
Here is the progression I use to teach people to find their ease in water and is quite simple. You can do it on your own or have someone assist you:
Floating on your back ~
Feel the buoyancy created by expanding the ribcage and lungs.
Floating on your side body ~ Prerequisite for side stroke, side body is also the end position for breathing in the basic crawl, or freestyle.
Using fins and snorkel as props ~
This builds more confidence in the water.
Floating on your belly with a snorkel ~
Find ease face down in the water.
Building blocks of stroke technique ~
There are many levels of techniques to build a strong foundation.
Once the foundation is in place, start to remove the props ~ Development of shoulder timing to neck rotation so that one can arrive at side body also allows for a restorative breath.
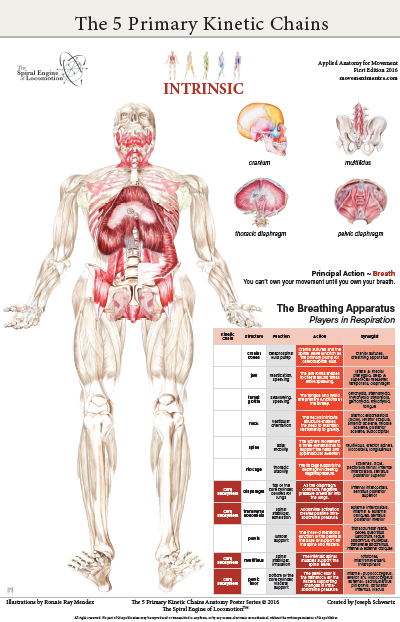
Understanding the breathing apparatus is integral in any mind body activity. The charts in the Intrinsic Anatomy Poster outline all the players participating in respiration.